














IoT
Introduction to Bluetooth Meshes



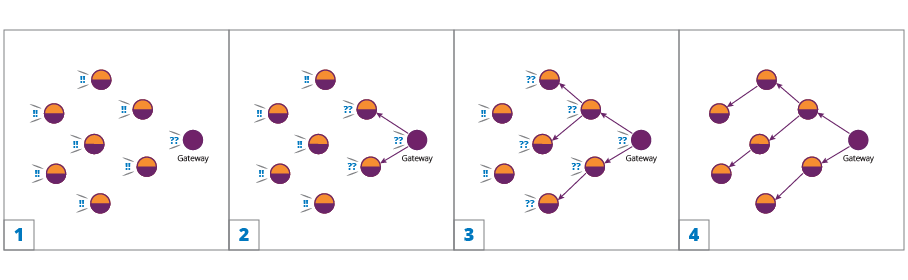
The existence of a single root node in a mesh has some interesting implications. As it is the only device without a central connection, the root node is the only device in a mesh that is still able to actively advertise itself.
On the whole, this doesn’t create issues when adding more dual-role devices to the mesh. Those devices can either scan for peripherals and connect to the root node as a central—thereby becoming the new root mode; or they can advertise themselves and accept a connection request from any other scanning node in the mesh, becoming a peripheral.






Disclaimer: The statements and opinions expressed in this article are those of the author(s) and do not necessarily reflect the positions of Thoughtworks.

